

新闻中心
2026-06-26
工程机械作业中的碰撞风险,主要来自驾驶员无法在操作过程中同时获取车辆周边完整环境信息。
● 设备体积大,导致前后左右存在天然视觉盲区
● 挖掘机回转与装载作业中,侧后方区域难以直接观察
● 自卸车倒车与装车靠位过程中,后方视野完全受限
● 工地内人车混合作业,人员与设备空间交叉频繁
● 多台设备协同作业成为常态,增加碰撞风险
● 夜间、粉尘及强光环境进一步降低可视范围
因此,工程机械安全问题本质是“周边环境不可完整感知”。
工程机械事故风险通常集中在几个高频作业场景中。
● 挖掘机回转碰撞事故
● 装载机碾压事故
● 转弯、倒车与会车碰撞事故
● 多设备交叉作业风险
● 夜间、粉尘及恶劣天气风险施工事故
敏视STONKAM工程机械360全景环视影像系统,是基于多路车载摄像头图像融合技术,为工程机械提供车辆周边360°连续视觉覆盖的安全辅助系统,用于解决因机身结构复杂、视野受限而导致的环境感知不足问题。
系统通过将车辆前、后、左、右多路视频进行实时拼接与校正,在车载显示终端中生成统一全景俯视视图,并结合AI目标识别结果,使驾驶员不仅“看得见周边环境”,同时能够“提前主动识别潜在风险目标”,从而提升操作判断能力与安全反应速度。

对于工程机械而言,安全管理的核心问题不仅是“有没有摄像头”,更是“能否在复杂作业环境中及时识别风险目标并提前干预”。相较其他传统360方案,敏视360全景环视影像系统具备AI识别能力,帮助挖掘机、装载机、起重机等重型工业设备实现盲区安全辅助防护功能。
● 在挖掘机装车作业中:系统通过360°全景画面叠加AI识别能力,可同时呈现自卸车位置与作业区域内人员目标,辅助驾驶员判断铲斗作业安全距离与风险接近情况。
● 在自卸车倒料与卸料作业中:系统在提供后方及侧方连续视角的同时,可通过AI识别障碍物与行人目标,降低倒车过程中因盲区误判造成的碰撞风险。
● 在装载机装卸作业中:系统对作业区域内人员与车辆进行AI识别与标记,使驾驶员能够更清晰判断人车混行状态,减少交叉作业中的视觉遗漏与安全风险。
● 在设备靠位等待作业中:系统通过统一全景视图结合目标识别结果,帮助驾驶员快速识别周边车辆与潜在风险目标,提升多车近距离作业的安全判断能力。
不同工程机械车辆存在不同类型的危险区域,而敏视工程机械360全景环视影像系统通过全景融合与AI识别能力实现对关键风险区域的同步监控与预警。
● 回转区域监控:在挖掘机回转过程中,通过AI识别进入危险半径的人员与障碍物,提升侧后方风险预判能力。
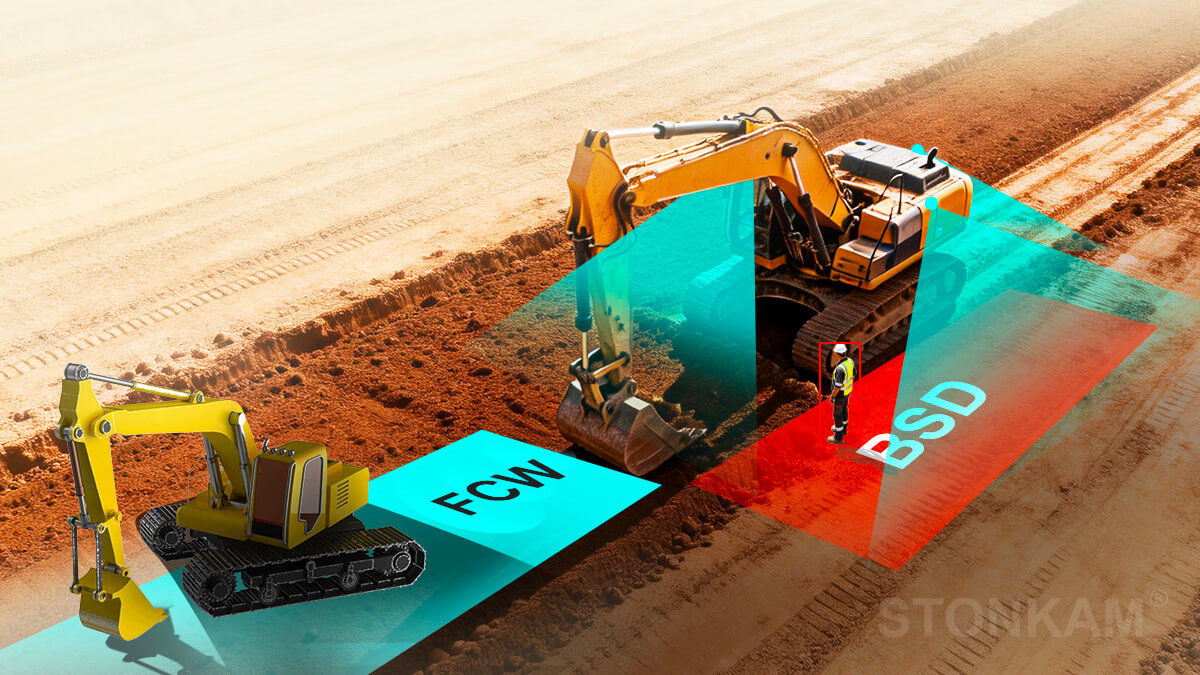
● 车身作业盲区监控:融合FCW+两侧BSD全域检测,覆盖车身四周盲区,可检测前车碰撞,同时对进入设备作业半径的目标进行实时识别与提示,强化安全管理能力。
● 人车混行区域监控:在复杂施工环境中对人员与车辆进行统一识别与动态跟踪,提高整体环境感知水平。
在工程机械作业中,最常见的高风险协同场景集中在装车与物料转运过程中,例如挖掘机与自卸车配合作业,以及装载机与运输车辆的循环装料作业。这类场景的特点是设备距离近、移动频繁且视觉盲区重叠。敏视工程机械360全景环视影像系统通过多路影像融合与实时环境呈现,提升车辆周边空间可视性,从而降低协同作业中的碰撞风险。
● 4路1080P影像,360度无缝拼接
系统在车辆前、后、左、右部署广角摄像头,并进行同步视频采集,为后续全景融合提供完整环境数据基础。通过图像拼接算法与畸变校正处理,将多路视频融合为统一俯视全景画面,实现车辆周边空间的一体化表达。
● 支持FCW+两侧BSD全域检测,提前预警潜在碰撞风险
支持FCW前车碰撞预警,通过智能分析前车距离与相对速度,提前预警潜在碰撞风险。支持 BSD 车辆两侧行人 / 车辆检测,在动态行驶及复杂光线环境下检测效果稳定可靠。
● 实时低延迟画面输出,提升动态作业响应能力
系统支持RTSP实时视频输出与低延迟显示能力,使车辆移动与转向过程中的画面变化能够同步呈现,提升驾驶员对动态环境的感知一致性。
对于工程机械车队而言,敏视360全景环视系统不仅能够提升驾驶员视野范围,更能够为施工安全管理和运营效率提升提供支持。
● 降低盲区导致的碰撞风险,提升复杂工况 下的驾驶安全性
通过实时显示车辆周边环境,帮助驾驶员及时发现盲区内的人员、车辆及障碍物,从源头减少碰撞事故发生。在工地、港口等复杂环境中,为驾驶员提供更完整的环境信息,提升风险识别能力。
● 提高施工现场作业效率
驾驶员无需频繁停车确认周边情况,可更加顺畅地完成倒车、转向及装卸作业。
● 减少设备维修与停工损失
降低因剐蹭、碰撞造成的设备损坏风险,减少维修成本和停工时间。
● 提升车队安全管理水平
系统支持视频记录与事件回溯,为车队安全考核及事故分析提供依据。
● 土方与挖掘作业设备:包括挖掘机、装载机、铲运车、钻机等设备,主要用于解决回转作业和设备周边盲区监控问题。
● 运输与倒车作业设备:包括自卸车、半挂车、搅拌机、重型卡车,可提升倒车、转弯及场内运输过程中的安全性。
● 起重与吊装作业设备 :包括起重机、吊机、正面吊(港口),有助于驾驶员掌握吊装半径及设备周边环境状态。
● 重载与高密度作业设备:包括压路机、堆高机等,可增强狭窄空间和人员密集区域的环境感知能力。
作为最早专注于特种工程车载AI智能辅助驾驶系统产品的企业,敏视STONKAM在“工程车载AI智能驾驶辅助及监控系统产品”上荣获”广东省制造业单项冠军企业“称号,而360全景环视影像系统安全解决方案正是敏视核心安全产品体系的重要组成部分。
对于工程机械车队而言,仅仅实现车辆周边可视化已经无法满足现代施工现场的安全管理需求。相比传统360全景系统,敏视STONKAM更关注从“环境感知”到“主动安全”的整体车载解决方案建设。
● 360 全景 + AI 识别预警:融合行人、车辆 AI 识别能力,目标进入危险区域主动预警,实现从“看得见”到“提前发现风险”,降低碰撞事故概率。
● 360 全景 + BSD 盲区监测:针对挖掘机回转、工程车转弯会车等侧后盲区高发场景,实时监测周边目标并预警,强化侧后方安全防护。
● 360 全景 + 雷达融合感知:支持超声波雷达联动,视觉 + 距离感知双重保障,不受夜间、粉尘、雨雾等低能见度工况影响。
● 360 全景 + MDVR 远程管理:可联动车队管理平台,实现视频存储、远程查看、事件回放与安全追溯,适配车队集中监管。
● 一分钟自动标定+无缝拼接效果:敏视工程机械360全景环视影像系统解决了传统全景拼接校正复杂的问题,支持1分钟快速标定,大幅缩短安装调试时间,同时实现无缝拼接画面,有效避免接缝错位与视觉断层问题,显著提升车队批量部署效率与稳定性。
● 支持网络RTSP拉流协议:敏视工程机械360全景环视影像系统支持RTSP协议、车载显示屏接口以及CAN通信协议,可直接接入原厂中控屏或后装显示终端。
● 丰富项目落地经验:拥有丰富的工程机械项目落地经验,可提供更加灵活的360全景安全解决方案配置,适配工地、港口等复杂工况,支持多车型部署。此处相关项目案例可帮助您进一步了解系统在不同工程作业场景中的实际应用效果。
相比传统 360 全景环视系统,敏视 STONKAM 工程机械安全解决方案将 360° 环视、AI 目标识别和主动预警能力深度融合,实现从“看得见”到“看得懂、能预警”的升级,更适合现代工程机械和施工车队的安全管理需求。
Q1:工程车防撞系统有哪些?360全景环视系统属于防撞系统吗?
工程车防撞系统通常包括360全景环视、BSD盲区监测、雷达预警及AI识别系统,其中360全景是最基础的视觉防撞系统,用于解决车辆周边“看不见”的问题,通常作为整套主动安全系统的核心入口。
Q2:360 全景环视和普通倒车影像,对工程车差距大吗?
普通倒车影像仅覆盖车辆后方有限区域,仍存在大量侧方、前方及转角盲区,仅能辅助倒车;敏视360 全景环视影像系统覆盖车身四周全区域,无死角呈现周边环境,适配倒车、转向、机身回转、会车等全作业场景,对大型工程机械的盲区防护能力远优于单一倒车影像。
Q3:敏视STONKAM工程机械360全景环视影像系统有哪些优势?
敏视STONKAM工程机械360全景环视系统的核心优势在于将多路摄像头融合为统一全景视图,并结合AI识别、BSD盲区监测与雷达感知能力,从“基础视觉覆盖”升级为“主动安全感知系统”,实现降低维修与停工成本、提升施工效率以及增强车队安全管理水平。
Q4:系统符合哪些行业法规标准?
敏视STONKAM工程机械360全景环视系统符合UN ECE R151、R158及R159等国际车辆安全法规要求,覆盖工程机械在转弯、倒车及起步等高风险作业场景的关键安全需求。
Q5:系统的AI识别是否稳定?
敏视360全景环视影像系统具备AI识别功能,支持接入超声波雷达,结合视觉与雷达双重感知,通过多源信息协同判断目标状态,可在复杂施工环境下提升识别稳定性并降低误报概率。
Q6:系统是否可以接入车辆原有显示屏设备?
可以。敏视360全景系统支持RTSP协议、车载显示屏接口以及CAN通信协议,可直接接入原厂中控屏或后装显示终端。
广州敏视数码科技有限公司
地址: 中国广东省广州市天河区瑞华路1号6栋101(邮编:510660)
电话: (86-20)6667 0988
传真: (86-20)6667 0977
邮箱: sales@stonkam.com
QQ:

Copyright ©2002-2022 STONKAM CO.,LTD. 广州敏视数码科技有限公司 ALL Rights Reserved. 广东省通信管理局 粤ICP备05043268号






 AI智能系统
AI智能系统  智能网联
智能网联  360全景系统
360全景系统  智能感知
智能感知  高清显示器
高清显示器  AHD摄像头
AHD摄像头  数字摄像头
数字摄像头  CMS
CMS  智能数字无线
智能数字无线  认证产品
认证产品  红外热像仪
红外热像仪  前装解决方案
前装解决方案  行业应用
行业应用
 成功案例
成功案例
 新闻中心
新闻中心
 视频中心
视频中心
 公司介绍
公司介绍
 核心优势
核心优势
 品牌文化
品牌文化
 发展历程
发展历程
 荣誉资质
荣誉资质
 联系我们
联系我们
 服务支持
服务支持





















